

ຜະລິດຕະພັນ









ຄໍາແນະນໍາການດໍາເນີນງານສໍາລັບຜູ້ປະຕິບັດງານປະຕູອັດຕະໂນມັດແນວນອນ
| ປະເພດຜະລິດຕະພັນ | KMJ 100 |
| ຂອບເຂດຂອງຄໍາຮ້ອງສະຫມັກ | ປະຕູເປີດແປນຕ່າງໆທີ່ມີຄວາມກວ້າງ ≤1200mm ແລະນ້ຳໜັກ ≤ 100Kg |
| ເປີດມຸມ | 90° |
| ການສະຫນອງພະລັງງານ | AC220v |
| ລະດັບພະລັງງານ | 30W |
| ພະລັງງານຄົງທີ່ | <2W (ບໍ່ມີລັອກແມ່ເຫຼັກໄຟຟ້າ) |
| ຄວາມໄວເປີດ/ປິດ | 1-12 ເກຍ, ປັບໄດ້ (ເວລາເປີດທີ່ສອດຄ້ອງກັນ 15-3S) |
| ເປີດເວລາຖື | 1~99 ວິນາທີ |
| ອຸນຫະພູມປະຕິບັດການ | -20℃~60℃ |
| ຄວາມຊຸ່ມຊື້ນ | 30% ຫາ 95% (ບໍ່ມີການຂົ້ນ) |
| ຄວາມກົດດັນຂອງບັນຍາກາດ | 700hPa ~1060hPa |
| ຂະຫນາດພາຍນອກ | L 518mm*W 76mm*H 106mm |
| ນໍ້າຫນັກສຸດທິ | ປະມານ 5.2kg |
| ສາມໄລຍະເວລາຮັບປະກັນ | 12 ເດືອນ |
★ແນະນໍາຜະລິດຕະພັນ★
A. ຂະບວນການຕົ້ນຕໍ:
ເປີດປະຕູ → ເປີດ & ຊ້າລົງ → ຮັກສາສະຖານທີ່ → ປິດປະຕູ → ປິດ & ຊ້າລົງ → ລັອກປະຕູ.
B. ກະແສວຽກລະອຽດ:
ຂັ້ນຕອນທີ 1: ສັນຍານເປີດຈາກອຸປະກອນພາຍນອກກະຕຸ້ນໃຫ້ລັອກແມ່ເຫຼັກໄຟຟ້າຂອງຜູ້ປະຕິບັດການປະຕູປິດລົງ.
ຂັ້ນຕອນທີ 2: ເປີດປະຕູ.ຂັ້ນຕອນທີ 3: ເປີດແລະຊ້າລົງ.ຂັ້ນຕອນທີ 4: ຢຸດມັນ.
ຂັ້ນຕອນທີ 5: ເປີດຄ້າງໄວ້ (ເວລາອະນຸຍາດ 1 ຫາ 99 ວິນາທີ).ຂັ້ນຕອນທີ 6: ປິດປະຕູ (ຄວາມໄວອະນຸຍາດໃຫ້ 1 ຫາ 12 ເກຍ).ຂັ້ນຕອນທີ 7: ປິດແລະຊ້າລົງ (ຄວາມໄວທີ່ອະນຸຍາດໄດ້ 1 ຫາ 10 ເກຍ) ຂັ້ນຕອນທີ 8: ການເປີດການລັອກແມ່ເຫຼັກໄຟຟ້າ.
ຂັ້ນຕອນທີ 9: ກົດປິດປະຕູ.
ສິ້ນສຸດການໄຫຼວຽນຂອງການເຮັດວຽກ.
ຫມາຍເຫດ:ໃນຂະບວນການປິດປະຕູ, ຖ້າມີສັນຍານກະຕຸ້ນສໍາລັບການເປີດປະຕູ, ການກະທໍາຂອງການເປີດປະຕູຈະຖືກປະຕິບັດທັນທີ.
1).ການບໍລິໂພກຕ່ໍາ, ພະລັງງານ static <2W, ພະລັງງານສູງສຸດ: 50W.
2).ຄວາມງຽບສູງ, ມີສຽງລົບກວນເຮັດວຽກໜ້ອຍກວ່າ 50 dB.
3).ຂະຫນາດຂະຫນາດນ້ອຍ, ການຕິດຕັ້ງງ່າຍ.
4).ມີພະລັງ, ນໍ້າໜັກປະຕູສູງສຸດ 100 Kg.5).ຮອງຮັບສັນຍານ Relay input.
6).ມໍເຕີ over-current, overload, short-circuit ປ້ອງກັນ.
7).ຄວາມຕ້ານທານອັດສະລິຍະ, ການປົກປ້ອງປະຕູປີ້ນ.
8).ມໍເຕີໃນປະຈຸບັນ (thrust), ຄວາມໄວລະບຽບທີ່ຖືກຕ້ອງ.
9).ຂໍ້ຈໍາກັດການຮຽນຮູ້ດ້ວຍຕົນເອງ, ປະຖິ້ມຂໍ້ຈໍາກັດ tediousdebugging.10).ເປືອກຫຸ້ມນອກ, ປ້ອງກັນຝົນແລະຝຸ່ນ.
★ການຕິດຕັ້ງ★
A. ການສະຫນອງພະລັງງານຂອງປະຕູອັດຕະໂນມັດແນວນອນແມ່ນ AC 220V, ປິດໄຟກ່ອນທີ່ຈະຕິດຕັ້ງແລະການເຮັດວຽກສົດແມ່ນຫ້າມຢ່າງເຂັ້ມງວດ.
B.The Horizontal Automatic Door Operator ເຫມາະສໍາລັບພາຍໃນຫ້ອງ.ການຕິດຕັ້ງຕ້ອງໄດ້ປະຕິບັດຕາມຂະຫນາດທີ່ລະບຸໄວ້ໃນຄໍາແນະນໍາ.ການຕິດຕັ້ງທີ່ບໍ່ຖືກຕ້ອງຈະເຮັດໃຫ້ຜູ້ປະຕິບັດການປະຕູໂດຍກົງບໍ່ສາມາດເຮັດວຽກໄດ້ຢ່າງຖືກຕ້ອງແລະທໍາລາຍອຸປະກອນໃນກໍລະນີທີ່ຮ້າຍແຮງ.
C. ໃນລະຫວ່າງການຕິດຕັ້ງ, ມັນຖືກຫ້າມບໍ່ໃຫ້ປ່ຽນໂຄງສ້າງຂອງຜູ້ປະຕິບັດການປະຕູແລະບໍ່ມີຮູທີ່ສາມາດເຮັດໄດ້ໃນແກະເພື່ອຫຼີກເວັ້ນການນ້ໍາແລະອາກາດເຂົ້າມາແລະເຮັດໃຫ້ອົງປະກອບເອເລັກໂຕຣນິກແລະໄຟຟ້າລົ້ມເຫລວ.
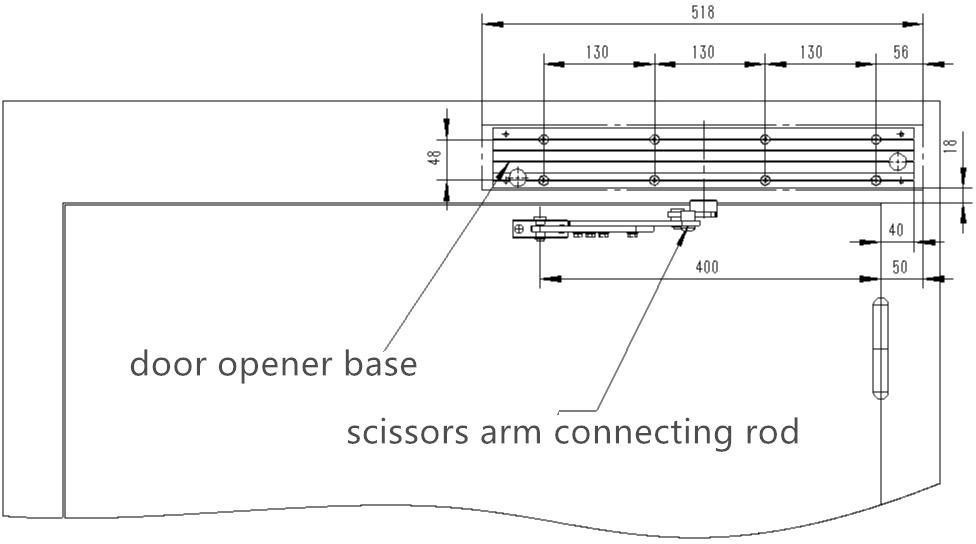
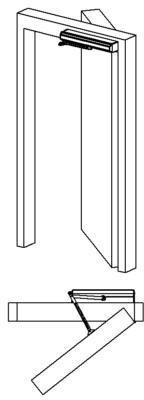
ແຜນວາດ 2-1(ຊ້າຍ/ຂວາ ພາຍໃນເປີດສຳລັບປະຕູເປີດປະຕູ)
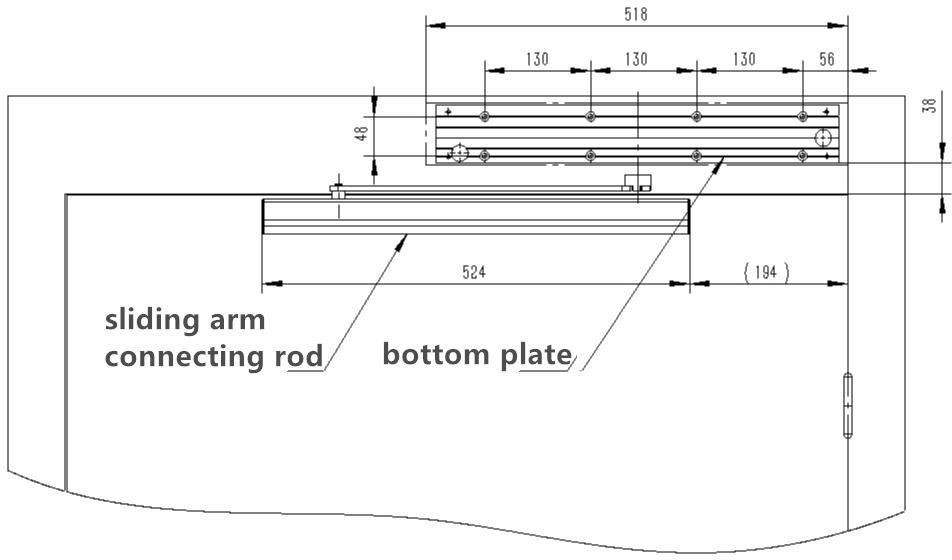
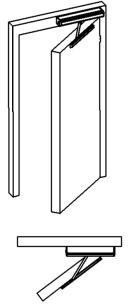
ແຜນວາດ 2-2 (ຊ້າຍ/ຂວາ ເປີດປະຕູສຳລັບເປີດປະຕູສະໄລ້)
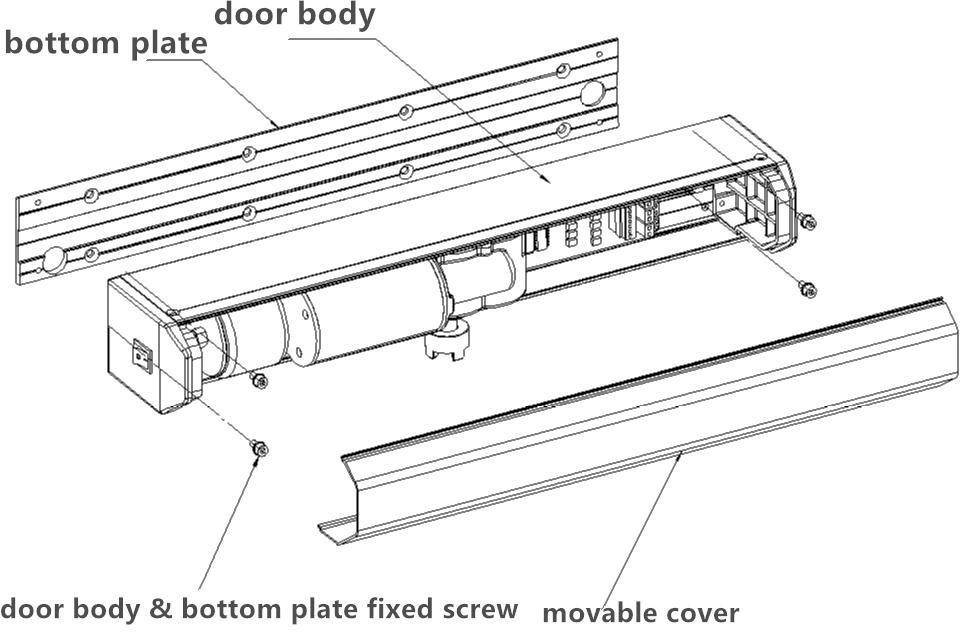
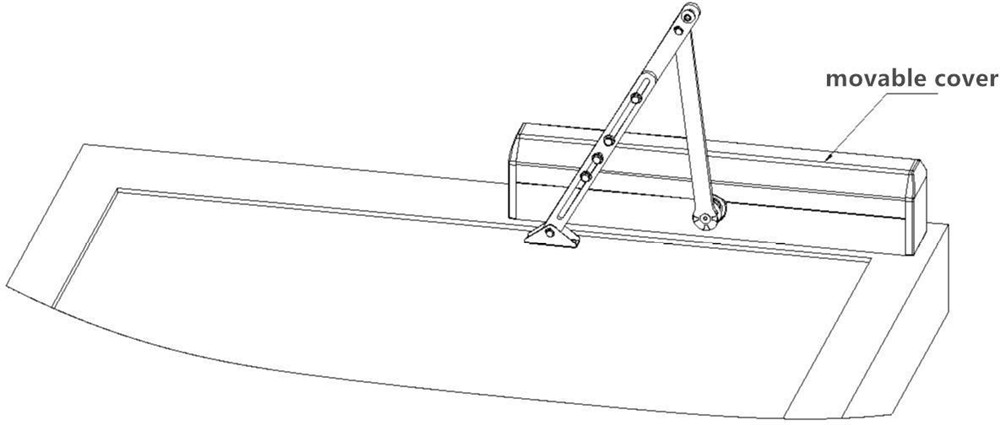
1. ກວດເບິ່ງແລະໃຫ້ແນ່ໃຈວ່າເຄື່ອງບໍ່ເສຍຫາຍ.ແລະຫຼັງຈາກນັ້ນເອົາການປົກຫຸ້ມຂອງຍ້າຍໄດ້ກ່ຽວກັບການເປີດປະຕູໂດຍການກົດ.ໃຊ້ screw hexagonal ພາຍໃນເອົາ screw ທີ່ແກ້ໄຂເຄື່ອງທັງຫມົດແລະແຜ່ນລຸ່ມພາຍໃນ. ດັ່ງຕໍ່ໄປນີ້:
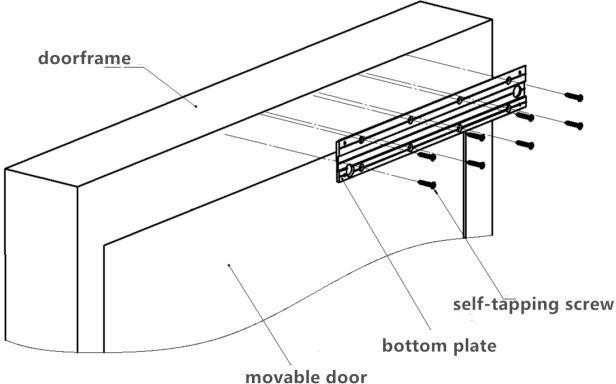
2. ອີງຕາມແຜນວາດຂະຫນາດການຕິດຕັ້ງ, ແກ້ໄຂແຜ່ນລຸ່ມຂອງຜູ້ປະຕິບັດການປະຕູກັບກອບປະຕູຫຼືຝາດ້ວຍ screw ຕົນເອງ tapping ຫຼື screw ການຂະຫຍາຍຕົວ.
ດັ່ງນີ້:
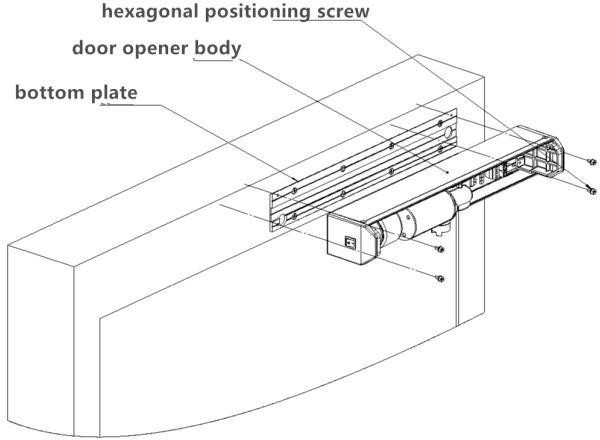
3.Hang ເຈົ້າພາບຂອງ opener ປະຕູໃນແຜ່ນທາງລຸ່ມທີ່ຕິດຕັ້ງໂດຍຜ່ານຊ່ອງສຽບຢູ່ທາງລຸ່ມຂອງເຈົ້າພາບ, ເອົາໃຈໃສ່ກັບຮູຄົງທີ່ທັງສອງດ້ານ, ແລະແກ້ໄຂດ້ວຍ screw hexagon ພາຍໃນໄດ້ໂຍກຍ້າຍອອກກ່ອນທີ່ຈະ.
ດັ່ງນີ້:
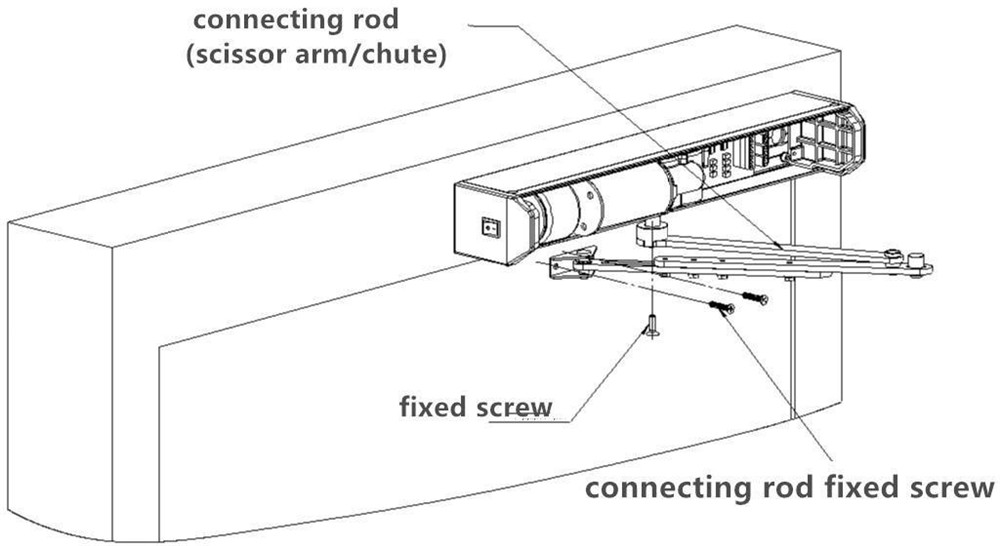
4. ຕິດຕັ້ງ rod ເຊື່ອມຕໍ່, ເອົາໃຈໃສ່ກັບທິດທາງຂອງ rod ເຊື່ອມຕໍ່.ສ້ອມແປງ rod ເຊື່ອມຕໍ່ກ່ຽວກັບ shaft ຜົນຜະລິດແລະປະຕູຂອງການຫຼຸດຜ່ອນທີ່ມີ screw M6 ການຈັບຄູ່ແລະການປາດສະກູຕາມລໍາດັບ.
ດັ່ງນີ້:
4. ຕິດຕັ້ງ rod ເຊື່ອມຕໍ່, ເອົາໃຈໃສ່ກັບທິດທາງຂອງ rod ເຊື່ອມຕໍ່.ສ້ອມແປງ rod ເຊື່ອມຕໍ່ກ່ຽວກັບ shaft ຜົນຜະລິດແລະປະຕູຂອງການຫຼຸດຜ່ອນທີ່ມີ screw M6 ການຈັບຄູ່ແລະການປາດສະກູຕາມລໍາດັບ.
ດັ່ງນີ້:
ຄຳເຕືອນ:
A. ໃນເວລາທີ່ພາກສ່ວນໄຟຟ້າໄດ້ຖືກເຊື່ອມຕໍ່, ການເຮັດວຽກສົດແມ່ນຫ້າມຢ່າງເຂັ້ມງວດ. ພະລັງງານສາມາດ energized ຫຼັງຈາກການເຊື່ອມຕໍ່ທັງຫມົດ .
B. ຢ່າເຊື່ອມຕໍ່ຂົ້ວບວກແລະລົບຂອງການສະຫນອງພະລັງງານ inverse, ຖ້າບໍ່ດັ່ງນັ້ນອຸປະກອນຈະເສຍຫາຍ.
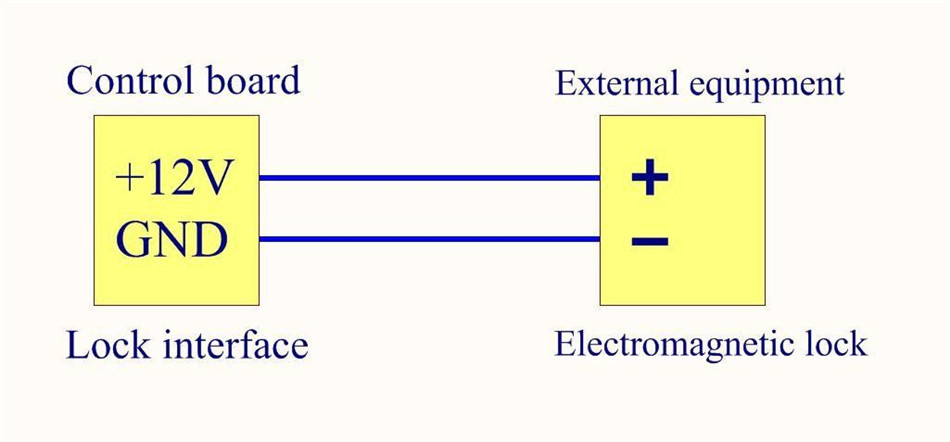
ຫມາຍເຫດ: A. ກະລຸນາເລືອກ lock ແມ່ເຫຼັກໄຟຟ້າທີ່ມີແຮງດັນການສະຫນອງແມ່ນ 12V DC ແລະພະລັງງານ ≤9W ຫຼື lock ແມ່ເຫຼັກໄຟຟ້າຂອງບໍລິສັດຂອງພວກເຮົາ. ຖ້າບໍ່ດັ່ງນັ້ນມັນຈະເຮັດໃຫ້ເກີດການເຮັດວຽກຜິດປົກກະຕິຫຼືຄວາມເສຍຫາຍຂອງວົງຈອນ.
B: ເມື່ອອອກຈາກໂຮງງານ, ສາຍມໍເຕີໄດ້ຖືກເຊື່ອມຕໍ່, ຢ່າເອົາມັນອອກໂດຍບໍ່ມີກໍລະນີພິເສດ.
C: ສັນຍານເປີດອຸປະກອນຄວບຄຸມການເຂົ້າເຖິງພາຍນອກ:
①ໃນເວລາທີ່ອຸປະກອນການຄວບຄຸມການເຂົ້າເຖິງແມ່ນຜົນຜະລິດຂອງປະລິມານສະຫຼັບ (ການຕິດຕໍ່ແຫ້ງ), ສະຫຼັບປິດຄວບຄຸມການເປີດຂອງປະຕູໄດ້, ແລະສະຫຼັບຄວນຈະເປີດເປັນປົກກະຕິ, ໂດຍບໍ່ມີການຄວາມຕ້ອງການ polarity.
②ເມື່ອແຮງດັນອອກ (ການຕິດຕໍ່ຊຸ່ມ), ເພີ່ມໂມດູນການໂອນ.
| ຊື່ | Standby Power Supply | ການໂຕ້ຕອບສະຫຼັບ photoelectric ອິນຟາເຣດ | ເປີດສັນຍານ | ການເຊື່ອມໂຍງການຕໍ່ສູ້ກັບໄຟ | ລັອກແມ່ເຫຼັກໄຟຟ້າ | |
| ຊື່ | ກະດານຄວບຄຸມ | ການສະຫນອງພະລັງງານ | ລັອກແມ່ເຫຼັກໄຟຟ້າ | ເຄື່ອງຄວບຄຸມການເຂົ້າເຖິງ | ||
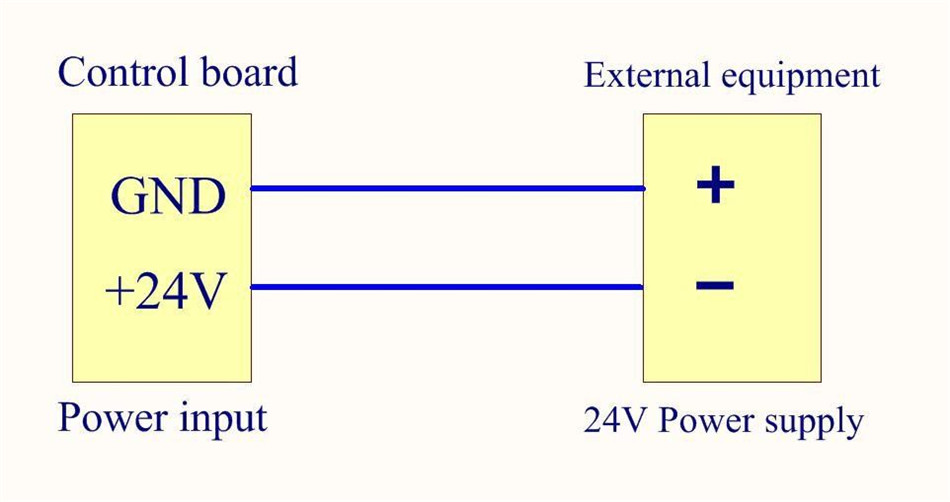
| Standby Power Supply | GND | ລົບ | ||||
| 24V | ບວກ | |||||
| ການໂຕ້ຕອບສະຫຼັບ photoelectric ອິນຟາເຣດ | GND | |||||
| ສະຫຼັບ 2 | ||||||
| ສະຫຼັບ 1 | ||||||
| 12V | |||
| ເປີດສັນຍານ | GND | GND COM | |
| NO | NO | ||
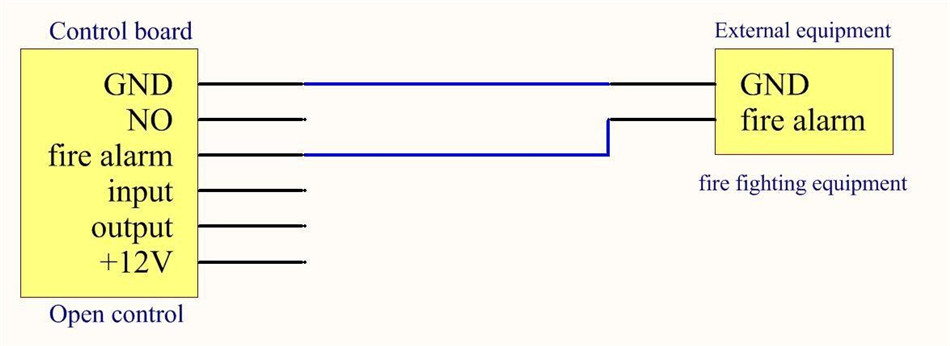
| ການເຊື່ອມໂຍງການຕໍ່ສູ້ກັບໄຟ | ການຕໍ່ສູ້ກັບໄຟ | ||
| ວັດສະດຸປ້ອນ | |||
| ຜົນຜະລິດ | |||
| 12V | 12V | ||
| ລັອກແມ່ເຫຼັກໄຟຟ້າ | 12V | ເສັ້ນສີແດງ | |
| GND | ເສັ້ນສີດໍາ |
ເຊື່ອມຕໍ່ການສະຫນອງພະລັງງານ, ລັອກແມ່ເຫຼັກໄຟຟ້າແລະອຸປະກອນຄວບຄຸມການເປີດປະຕູພາຍນອກຕາມແຜນວາດ.ຫຼັງຈາກການກວດສອບ, ເລີ່ມຕົ້ນການກໍານົດພະລັງງານ.
1.Standby power interface ເຊື່ອມຕໍ່ 24V standby power supply (standby power supply ສາມາດເລືອກໄດ້ໂດຍບໍ່ຕ້ອງເຊື່ອມຕໍ່ຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້)
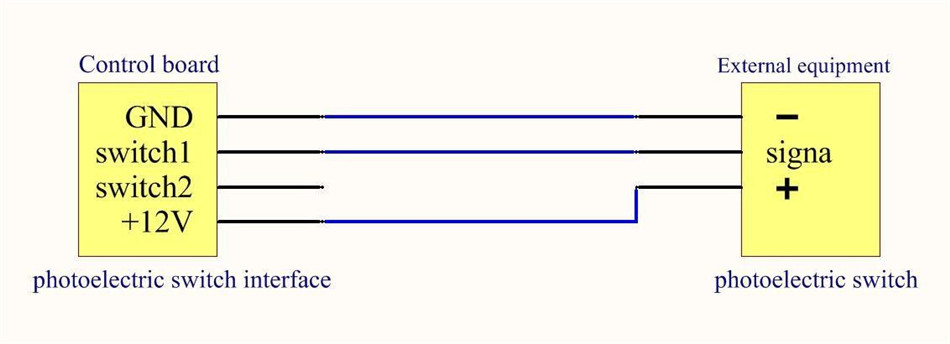
2.Infrared photoelectric switch interface (ຫມາຍເຫດ: ກະລຸນາໃຊ້ NPN ປະເພດເປີດປົກກະຕິ)
3.Access Control machine ເຊື່ອມຕໍ່ສັນຍານຄວບຄຸມຂອງຜູ້ປະຕິບັດງານປະຕູ:
ການເຊື່ອມຕໍ່ຄັ້ງທໍາອິດ:
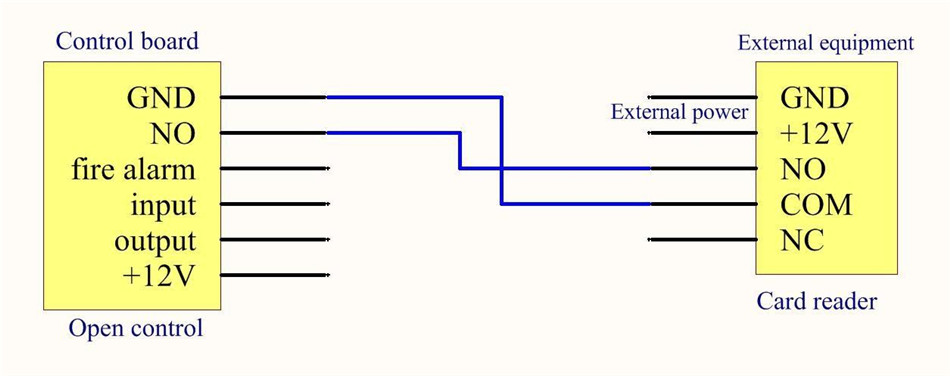
ການເຊື່ອມຕໍ່ຄັ້ງທີສອງ:
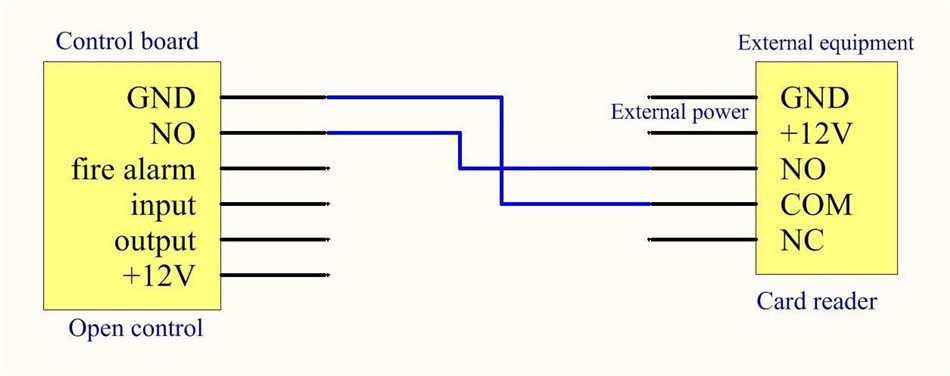
ຫມາຍເຫດ:ສັນຍານເປີດປະຕູທັງໝົດຄວນເຊື່ອມຕໍ່ກັບຈຸດດຽວກັນ (GNG, NO)
4.Fire signal interface ເຊື່ອມຕໍ່ອຸປະກອນການຕໍ່ສູ້ກັບໄຟ
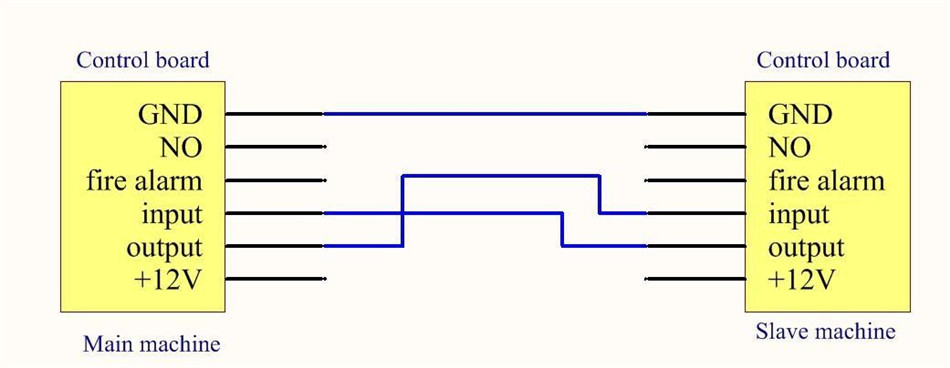
5.ການເຊື່ອມຕໍ່ການເຊື່ອມຕໍ່ການເຂົ້າ / ຜົນຜະລິດ interlocking ສອງເຄື່ອງຈັກ (ແມ່ບົດ / ສໍາລອງສາມາດໄດ້ຮັບການກໍານົດໂດຍການຕັ້ງຄ່າ)
6.Electromagnetic lock interface ເຊື່ອມຕໍ່ lock ແມ່ເຫຼັກໄຟຟ້າ
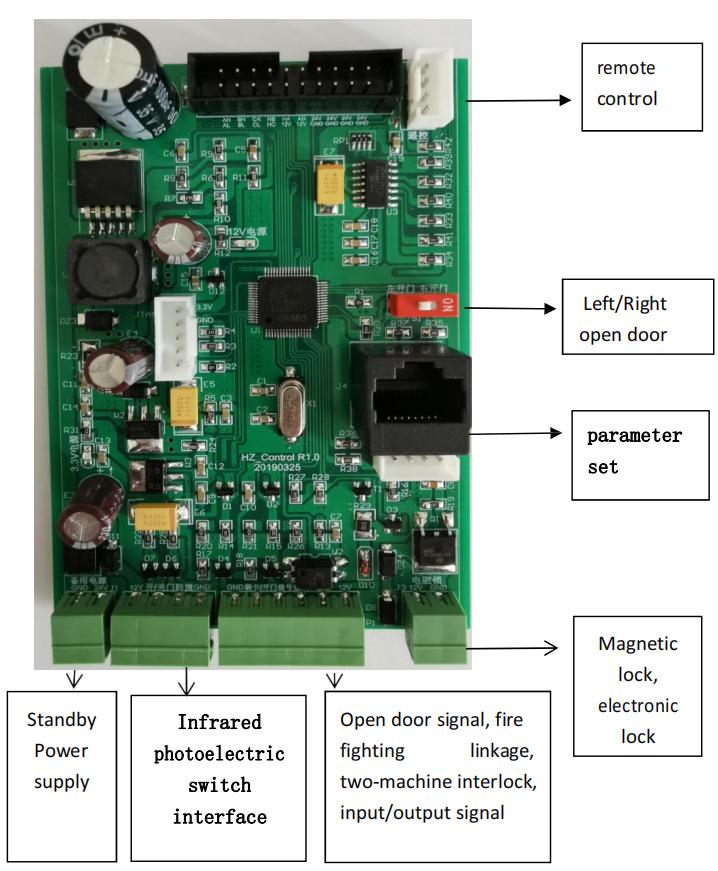
ກະດານຄວບຄຸມປະຕູອັດຕະໂນມັດຕາມແນວນອນ
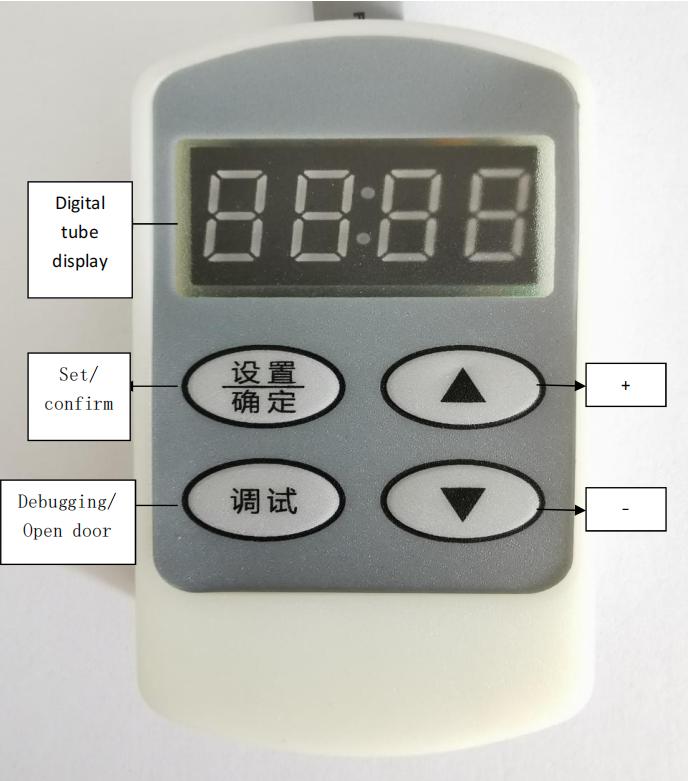
ດ້າມຈັບການຕັ້ງຄ່າຕົວປະຕິບັດການປະຕູແນວນອນ
ເຊື່ອມຕໍ່ຕົວຈັບການຕັ້ງຄ່າພາລາມິເຕີກັບກະດານຫຼັກຄວບຄຸມ .ຫຼັງຈາກການຕິດຕັ້ງ ແລະສາຍ, ເປີດໄຟ ແລະເຄື່ອງເປີດປະຕູຈະເຂົ້າສູ່ສະພາບການຮຽນຮູ້ຂອງຕໍາແໜ່ງປິດ (ຈໍສະແດງຜົນທໍ່ດິຈິຕອນ “H07”).
ຫຼັງຈາກທີ່ໃກ້ຊິດແລະສໍາເລັດການຮຽນຮູ້, ມັນເຂົ້າໄປໃນສະຖານະການສະແຕນບາຍ, ແລະ
ທໍ່ດິຈິຕອນສະແດງ"_ _ _"ຢູ່ໃນສະຖານະສະແຕນບາຍ.
★ການຕັ້ງຄ່າພາລາມິເຕີແລະການສະແດງສະຖານະ ★
ຟັງຊັນແລະການສະແດງທໍ່ດິຈິຕອນທີ່ສອດຄ້ອງກັນ:
| ການຫຼິ້ນ | ອະທິບາຍ | ຄ່າເລີ່ມຕົ້ນ | ຊ່ວງ | ຂໍ້ສັງເກດ |
| P01 | ຄວາມໄວປິດ | 5 | 1-12 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ຄວາມໄວໄວຂຶ້ນ. |
| P02 | ປິດຄວາມໄວຊ້າ | 3 | 1-10 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ຄວາມໄວໄວຂຶ້ນ. |
| P03 | ການປິດການຊັກຊ້າ | 5 | 1-15 | ບັງຄັບໃຫ້ປະຕູປິດໃສ່ບ່ອນ. |
| P04 | ເວລາເປີດ & ຖື | 5 | 1-99 | ເວລາທີ່ຢູ່ອາໄສຫຼັງຈາກເປີດປະຕູໃນສະຖານທີ່. |
| P05 | ປິດມຸມຊ້າ | 35 | 5-60 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ມຸມໃຫຍ່ກວ່າ. |
| P06 | ແຮງບິດຄວາມໄວສູງ (ກະແສໄຟຟ້າຄວາມໄວສູງ) | 110 | 20-200 | ຫົວໜ່ວຍແມ່ນ 0.01A |
| P07 | ເວລາຕ້ານລົມ | 3 | 1-10 | ຫົວໜ່ວຍແມ່ນ S |
| P08 | ຊ້າຍ / ຂວາເປີດປະຕູ | 3 | ມ1 ປະຕູເປີດຊ້າຍ = 2 ປະຕູເປີດຂວາມ3 ການທົດສອບ | ຄ່າເລີ່ມຕົ້ນທີ 3: ເປີດປະຕູຕາມສະວິດໜ້າປັດສີແດງເທິງແຜງວົງຈອນ. |
| P09 | ກວດເບິ່ງຕໍາແຫນ່ງປິດ | 1 | ປິດອີກເທື່ອຫນຶ່ງເປີດອີກເທື່ອຫນຶ່ງບໍ່ມີການກວດສອບ | ເມື່ອປະຕູບໍ່ໄດ້ປິດໃນ positionAt1 ມັນຈະປິດອີກເທື່ອຫນຶ່ງ At2 ມັນຈະເປີດອີກເທື່ອຫນຶ່ງ At3 ບໍ່ມີການປະຕິບັດ |
| P10 | ຄວາມໄວເປີດ | 5 | 1-12 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ຄວາມໄວໄວຂຶ້ນ. |
| P11 | ເປີດຄວາມໄວຊ້າ | 3 | 1-10 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ຄວາມໄວໄວຂຶ້ນ. |
| P12 | ເປີດມຸມຊ້າ | 15 | 5-60 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ມຸມໃຫຍ່ກວ່າ. |
| P13 | ເປີດມຸມ | 135 | 50-240 | ມຸມເຊື່ອມຕໍ່ |
| P14 | ແຮງລັອກ | 10 | 0-20 | 0 ບໍ່ມີແຮງລັອກ 1-10 ແຮງລັອກຈາກຕໍ່າຫາສູງ(ພະລັງງານຕໍ່າ) 11-20 ແຮງລັອກຈາກຕໍ່າຫາສູງ(ພະລັງງານສູງ) |
| P15 | ຣີເຊັດເປັນຄ່າໂຮງງານ | 2 | ໂໝດເຮັດວຽກທົດສອບ ໂໝດ66 ການພັກຜ່ອນຈາກໂຮງງານ | |
| P16 | ຮູບແບບການເຮັດວຽກ | 1 | 1-3 | ເຄື່ອງດຽວ ເຄື່ອງຈັກຕົ້ນຕໍ ເຄື່ອງສໍາລອງ |
| P17 | ເວລາປິດເຄື່ອງຫຼັກ | 5 | 1-60 | 1 ຫມາຍຄວາມວ່າ 0.1Sonly ໃຊ້ໃນໂຫມດໂຮດ |
| P18 | ຊັກຊ້າກ່ອນການເປີດ | 2 | 1-60 | 1 ຫມາຍຄວາມວ່າ 0.1S |
| P19 | ກະແສຄວາມໄວຕໍ່າ | 70 | 20-150 | ໜ່ວຍ 0.01A |
| P20 | ການເຊື່ອມໂຍງການຕໍ່ສູ້ກັບໄຟ | 1 | 1-2 | signal ເປັນສັນຍານເປີດເປັນສັນຍານໄຟ |
| P21 | ຣີເຊັດເປັນຄ່າໂຮງງານ | 0 | 0-10 | ຣີເຊັດເປັນຄ່າໂຮງງານ |
| P22 | ການເລືອກໂໝດໄລຍະໄກ | 1 | 1-2 | Inching (ກະແຈທັງ ໝົດ ສາມາດໃຊ້ເປັນກະແຈເປີດໄດ້, ເວລາເປີດປະຕູຊ້າລົງໄປສູ່ການປິດອັດຕະໂນມັດ) Interlocking (ກົດປຸ່ມເປີດເພື່ອເປີດປະຕູແລະເປີດປົກກະຕິ, ຕ້ອງກົດປຸ່ມປິດເພື່ອປິດ). |
| P23 | ໂຮງງານຖື | ໂຮງງານຖື | ||
| P24 | ການເລືອກລັອກແມ່ເຫຼັກ/ອີເລັກໂທຣນິກ | 1 | 1-2 | ລັອກແມ່ເຫຼັກ (ເປີດແລະລັອກ) ການຄວບຄຸມເອເລັກໂຕຣນິກ (ເປີດແລະເປີດ) |
| P25 | ໂຮງງານຖື | ໂຮງງານຖື | ||
| P26 | ຄ່າສໍາປະສິດຂອງການຕໍ່ຕ້ານ downwind | 4 | 1-10 | 0-4 ການຕໍ່ຕ້ານພະລັງງານລົມ (ການນໍາໃຊ້ຄວາມໄວສູງ) 5-10 ຄວາມຕ້ານທານລົມ (ການນໍາໃຊ້ຄວາມໄວຕ່ໍາ) |
ຈໍສະແດງຜົນເຮັດວຽກ H01-H09
| ການຫຼິ້ນ | ອະທິບາຍ | ຄ່າເລີ່ມຕົ້ນ | ຊ່ວງ | ຂໍ້ສັງເກດ |
| P01 | ຄວາມໄວປິດ | 5 | 1-12 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ຄວາມໄວໄວຂຶ້ນ. |
| P02 | ປິດຄວາມໄວຊ້າ | 3 | 1-10 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ຄວາມໄວໄວຂຶ້ນ. |
| P03 | ການປິດການຊັກຊ້າ | 5 | 1-15 | ບັງຄັບໃຫ້ປະຕູປິດໃສ່ບ່ອນ. |
| P04 | ເວລາເປີດ & ຖື | 5 | 1-99 | ເວລາທີ່ຢູ່ອາໄສຫຼັງຈາກເປີດປະຕູໃນສະຖານທີ່. |
| P05 | ປິດມຸມຊ້າ | 35 | 5-60 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ມຸມໃຫຍ່ກວ່າ. |
| P06 | ແຮງບິດຄວາມໄວສູງ (ກະແສໄຟຟ້າຄວາມໄວສູງ) | 110 | 20-200 | ຫົວໜ່ວຍແມ່ນ 0.01A |
| P07 | ເວລາຕ້ານລົມ | 3 | 1-10 | ຫົວໜ່ວຍແມ່ນ S |
| P08 | ຊ້າຍ / ຂວາເປີດປະຕູ | 3 | ມ1 ປະຕູເປີດຊ້າຍ = 2 ປະຕູເປີດຂວາມ3 ການທົດສອບ | ຄ່າເລີ່ມຕົ້ນທີ 3: ເປີດປະຕູຕາມສະວິດໜ້າປັດສີແດງເທິງແຜງວົງຈອນ. |
| P09 | ກວດເບິ່ງຕໍາແຫນ່ງປິດ | 1 | ປິດອີກເທື່ອຫນຶ່ງເປີດອີກເທື່ອຫນຶ່ງບໍ່ມີການກວດສອບ | ເມື່ອປະຕູບໍ່ໄດ້ປິດໃນ positionAt1 ມັນຈະປິດອີກເທື່ອຫນຶ່ງ At2 ມັນຈະເປີດອີກເທື່ອຫນຶ່ງ At3 ບໍ່ມີການປະຕິບັດ |
| P10 | ຄວາມໄວເປີດ | 5 | 1-12 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ຄວາມໄວໄວຂຶ້ນ. |
| P11 | ເປີດຄວາມໄວຊ້າ | 3 | 1-10 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ຄວາມໄວໄວຂຶ້ນ. |
| P12 | ເປີດມຸມຊ້າ | 15 | 5-60 | ຄ່າຕົວເລກໃຫຍ່ກວ່າ, ມຸມໃຫຍ່ກວ່າ. |
| P13 | ເປີດມຸມ | 135 | 50-240 | ມຸມເຊື່ອມຕໍ່ |
| P14 | ແຮງລັອກ | 10 | 0-20 | 0 ບໍ່ມີແຮງລັອກ 1-10 ແຮງລັອກຈາກຕໍ່າຫາສູງ(ພະລັງງານຕໍ່າ) 11-20 ແຮງລັອກຈາກຕໍ່າຫາສູງ(ພະລັງງານສູງ) |
| P15 | ຣີເຊັດເປັນຄ່າໂຮງງານ | 2 | ໂໝດເຮັດວຽກທົດສອບ ໂໝດ66 ການພັກຜ່ອນຈາກໂຮງງານ | |
| P16 | ຮູບແບບການເຮັດວຽກ | 1 | 1-3 | ເຄື່ອງດຽວ ເຄື່ອງຈັກຕົ້ນຕໍ ເຄື່ອງສໍາລອງ |
| P17 | ເວລາປິດເຄື່ອງຫຼັກ | 5 | 1-60 | 1 ຫມາຍຄວາມວ່າ 0.1Sonly ໃຊ້ໃນໂຫມດໂຮດ |
| P18 | ຊັກຊ້າກ່ອນການເປີດ | 2 | 1-60 | 1 ຫມາຍຄວາມວ່າ 0.1S |
| P19 | ກະແສຄວາມໄວຕໍ່າ | 70 | 20-150 | ໜ່ວຍ 0.01A |
| P20 | ການເຊື່ອມໂຍງການຕໍ່ສູ້ກັບໄຟ | 1 | 1-2 | signal ເປັນສັນຍານເປີດເປັນສັນຍານໄຟ |
| P21 | ຣີເຊັດເປັນຄ່າໂຮງງານ | 0 | 0-10 | ຣີເຊັດເປັນຄ່າໂຮງງານ |
| P22 | ການເລືອກໂໝດໄລຍະໄກ | 1 | 1-2 | Inching (ກະແຈທັງ ໝົດ ສາມາດໃຊ້ເປັນກະແຈເປີດໄດ້, ເວລາເປີດປະຕູຊ້າລົງໄປສູ່ການປິດອັດຕະໂນມັດ) Interlocking (ກົດປຸ່ມເປີດເພື່ອເປີດປະຕູແລະເປີດປົກກະຕິ, ຕ້ອງກົດປຸ່ມປິດເພື່ອປິດ). |
| P23 | ໂຮງງານຖື | ໂຮງງານຖື | ||
| P24 | ການເລືອກລັອກແມ່ເຫຼັກ/ອີເລັກໂທຣນິກ | 1 | 1-2 | ລັອກແມ່ເຫຼັກ (ເປີດແລະລັອກ) ການຄວບຄຸມເອເລັກໂຕຣນິກ (ເປີດແລະເປີດ) |
| P25 | ໂຮງງານຖື | ໂຮງງານຖື | ||
| P26 | ຄ່າສໍາປະສິດຂອງການຕໍ່ຕ້ານ downwind | 4 | 1-10 | 0-4 ການຕໍ່ຕ້ານພະລັງງານລົມ (ການນໍາໃຊ້ຄວາມໄວສູງ) 5-10 ຄວາມຕ້ານທານລົມ (ການນໍາໃຊ້ຄວາມໄວຕ່ໍາ) |
| ການຫຼິ້ນ | ອະທິບາຍ | ຂໍ້ສັງເກດ |
| - - - | ຖືລັດ | ສະແຕນບາຍໂດຍບໍ່ມີການເຮັດວຽກ |
| H01 | ຄວາມໄວສູງເປີດປະຕູ | ເປີດປະຕູດ້ວຍຄວາມໄວສູງ |
| H02 | ເປີດ&ຊ້າ | ເປີດຢຸດ & ຊ້າລົງ |
| H03 | ເປີດ&ຊ້າ | ເປີດຢຸດແລະຊ້າລົງ |
| H04 | ເປີດຄ້າງໄວ້ | ເປີດຢູ່ໃນສະຖານທີ່ຄ້າງໄວ້ |
| H05 | ຄວາມໄວສູງປິດປະຕູ | ປິດປະຕູດ້ວຍຄວາມໄວສູງ |
| H06 | ປິດ&ຊ້າ | ປິດການຢຸດແລະຊ້າລົງ |
| H07 | ປິດປະຕູ inplace Delay | ປິດປະຕູຢູ່ໃນສະຖານທີ່ |
| H08 | ການປົກປ້ອງປະຕູ | ຖ້າມໍເຕີຂັບລົດປະຈຸບັນສູງເກີນໄປເມື່ອເປີດ / ປິດປະຕູ, ຫຼືຍູ້ປະຕູປີ້ນກັບກັນ. |
| H09 | ປະຕູດ້ານຫຼັງ ປ້ອງກັນໄວ |
ຈໍສະແດງຜົນເຮັດວຽກ E01-E04
| ຈໍສະແດງຜົນ | ອະທິບາຍ | ຂໍ້ສັງເກດ |
| E01 | ລາຍງານຄວາມຜິດພາດຂອງການເປີດປະຕູ | |
| E02 | ລາຍງານຄວາມຜິດພາດຂອງການປິດປະຕູ | |
| E03 | ປິດການຢຸດຜິດພາດ | |
| E04 | ຄວາມຜິດຂອງມໍເຕີ | ຢ່າງຕໍ່ເນື່ອງ ການກວດພົບແລະການລາຍງານຄວາມຜິດພາດ 5 ຄັ້ງ |
★ Debugging ★
A. ສະຖານະປົກກະຕິ: ເປີດເຄື່ອງ, ທໍ່ດິຈິຕອນຢູ່ໃນກະດານວົງຈອນສະແດງ "H07", ແລະປະຕູເລື່ອນຊ້າໆໄປສູ່ການປິດອັດຕະໂນມັດ (ໃນຕໍາແຫນ່ງປິດການຮຽນຮູ້), ລໍຖ້າປະຕູປິດຢູ່ໃນສະຖານທີ່ແລະຈໍສະແດງຜົນດິຈິຕອນ"-- -”;
B. ສະພາບຜິດປົກກະຕິ: ເປີດເຄື່ອງ, ປະຕູປ່ຽນໄປມາເລື້ອຍໆ,
ຈາກນັ້ນຕັ້ງພາລາມິເຕີ P15 ເປັນ 02, ເມື່ອເປີດເຄື່ອງອີກຄັ້ງ, ແລະຫຼັງຈາກນັ້ນໃຫ້ສັງເກດເບິ່ງວ່າມັນຈະເຂົ້າສູ່ສະຖານະປົກກະຕິ A.
C.Abnormal state: Power-on, ທໍ່ດິຈິຕອນຢູ່ໃນກະດານວົງຈອນສະແດງໃຫ້ເຫັນ "H07".ເມື່ອປະຕູເຄື່ອນທີ່ໄປສູ່ການເປີດ, ກະລຸນາອ້າງອີງໃສ່ (3.1) ແລະກົດປຸ່ມກົດທິດທາງເປີດ (ສີແດງ) ໃນກະດານວົງຈອນໄປຫາທິດທາງກົງກັນຂ້າມ, ແລະຫຼັງຈາກນັ້ນສັງເກດເບິ່ງວ່າມັນຈະເຂົ້າໄປໃນສະພາບປົກກະຕິ A.
ຫມາຍເຫດ: ກະລຸນາຢ່າປິດກັ້ນເວລາຮຽນປິດຕໍາແຫນ່ງ, ຖ້າບໍ່ດັ່ງນັ້ນຕໍາແຫນ່ງປິດບັງຈະຖືກຖືວ່າເປັນຕໍາແຫນ່ງປິດ!
A.Opening Angle: ຖ້າມຸມເປີດບໍ່ພຽງພໍ, ເພີ່ມມູນຄ່າ P13;ຖ້າມັນໃຫຍ່ເກີນໄປ, ຫຼຸດລົງມູນຄ່າຂອງ P13 ເພື່ອບັນລຸມຸມທີ່ຕ້ອງການ.
B.Opening speed: ປັບຄ່າຂອງ P10, ຄ່າທີ່ໃຫຍ່ກວ່າ, ຄວາມໄວທີ່ໄວຂຶ້ນ, ຄວາມໄວຂອງຂະຫນາດນ້ອຍຈະຊ້າລົງ.
C. Time of open and hold : ເມື່ອປະຕູເປີດຢູ່ໃນສະຖານທີ່, ເວລາຂອງການຢຸດຢູ່ທີ່ຕໍາແຫນ່ງ, ແລະປັບຄ່າຂອງ P04 (inseconds).
A.Closing speed: ປັບຄ່າຂອງ P01, ຄ່າໃຫຍ່ຂຶ້ນ, ຄວາມໄວໄວ, ນ້ອຍກວ່າຊ້າ;
B: Close-slow Angle: ປັບຄ່າຂອງ P05, ຄ່າທີ່ໃຫຍ່ກວ່າ, Angle ໃຫຍ່ກວ່າ, ຄ່າຂອງມຸມນ້ອຍລົງ.
A: ປັບກະແສຄວາມໄວສູງ:
ກໍານົດ P06, ມູນຄ່າໂຮງງານແມ່ນ 110, ນັ້ນແມ່ນ, ກໍານົດ motor ເຮັດວຽກໃນປະຈຸບັນເປັນ 1.10A.
ຖ້າມໍເຕີເຮັດວຽກຜິດປົກກະຕິຫຼືບໍ່ເຮັດວຽກ, ຄ່າ P06 ຫຼື P19 ຕ້ອງເພີ່ມຂຶ້ນ.
ຖ້າມັນຖືກສະກັດຫຼືຖອຍຫລັງ, ຫຼຸດລົງ P06 ຫຼື P19.
B. ຖ້າປະຕູບໍ່ໄດ້ປິດຢູ່ໃນສະຖານທີ່, ເພີ່ມມູນຄ່າຂອງ P19 ຫຼື P02.
C. ຖ້າຄວາມໄວ buffer ໃກ້ຊິດແມ່ນໄວເກີນໄປ, ຫຼຸດລົງ P02 ແລະ P26 ຫຼືເພີ່ມ P05.
D. ກະລຸນາອ້າງອີງເຖິງ 3.1 ສໍາລັບການຕັ້ງຄ່າຕົວກໍານົດການອື່ນໆ, ມັນຄວນຈະເປັນໄປຕາມສະຖານະການຢູ່ໃນເວັບໄຊ.
★ບັນຫາທົ່ວໄປແລະການໂຍກຍ້າຍ★
| ປະກົດການຜິດ | ການຕັດສິນຄວາມຜິດ | ມາດຕະການການປິ່ນປົວ | |
| ບໍ່ເຮັດວຽກ, ແລະຕົວຊີ້ວັດພະລັງງານ 3.3v ແລະທໍ່ດິຈິຕອນບໍ່ສະຫວ່າງ. | ສະວິດເປີດ, 220 ສະຖານະຕົວຊີ້ບອກພະລັງງານ | ບໍ່ສົດໃສ | ກວດສອບ & ທົດແທນປະກັນໄພ .ກວດເບິ່ງ & ປ່ຽນສາຍໄຟ. ກວດສອບ & ປ່ຽນສະວິດ. |
| ສົດໃສ | ປ່ຽນກະດານວົງຈອນ. | ||
| ມໍເຕີບໍ່ເຮັດວຽກ | ກໍານົດພາລາມິເຕີ P6 ໂດຍອ້າງອີງໃສ່ 3.1.3, ເພີ່ມຄວາມໄວຂອງກະແສໄຟຟ້າ (ແຮງບິດຄວາມໄວສູງ), ແລະເລີ່ມຕົ້ນການເຮັດວຽກໃຫມ່. | ແກ້ໄຂບັນຫາ | ຈົບ |
| ຄວາມຜິດຍັງຄົງຢູ່ | 1.ປ່ຽນແຜງວົງຈອນ.2.ຕັດການເຊື່ອມຕໍ່ຈາກປະຕູໄປຫາແຂນ rocker ແລະກວດເບິ່ງວ່າ dooris blocked.3.ປ່ຽນ motor ຫຼື gearbox. | ||
| ເປີດບໍ່ຢູ່ໃນສະຖານທີ່ | ເພີ່ມມູນຄ່າ P13, ເພີ່ມມຸມເປີດປະຕູ. | ||
| ເປີດໂດຍບໍ່ມີການbuffer | ເພີ່ມມູນຄ່າ P 12, ເພີ່ມມຸມ buffer ຂອງປະຕູເປີດ. | ||
| ປິດບໍ່ຢູ່ໃນສະຖານທີ່ | ເພີ່ມມູນຄ່າຂອງ P19, ເພີ່ມມູນຄ່າຂອງປະຈຸບັນຄວາມໄວຕ່ໍາ (ແຮງບິດຄວາມໄວຕ່ໍາ), ຫຼືເພີ່ມມູນຄ່າຂອງ P2.,ເພີ່ມຄວາມໄວ buffer. | ||
| ປິດໂດຍບໍ່ມີການ buffer | ເພີ່ມມູນຄ່າຂອງ P05, ເພີ່ມມຸມ buffer ຂອງປະຕູປິດ.ຫຼຸດ P26 | ||
| ໃຊ້ເຄື່ອງວັດແທກທົ່ວໄປເພື່ອກວດເບິ່ງວ່າມີແຮງດັນໄຟຟ້າ 12V ຢູ່ສອງຈຸດຂອງ "ລັອກແມ່ເຫຼັກໄຟຟ້າ" ໃນ terminals ຂອງວົງຈອນ. | 1. ກວດເບິ່ງ ແລະປັບ | ||
| ໄດ້ | |||
| ແມ່ເຫຼັກໄຟຟ້າ | |||
| lock , ເຮັດໃຫ້ມັນແປ | |||
| ໃນເວລາທີ່ | ກັບທາດເຫຼັກ | ||
| ປະຕູປິດ, ໄດ້ | 12V | plate.2.ແທນທີ່ | |
| lock ບໍ່ສາມາດ | ແມ່ເຫຼັກໄຟຟ້າ | ||
| ລັອກ | ລັອກ. | ||
| ປະຕູ. | 3. ກວດກາ ແລະ | ||
| ແທນທີ່ | |||
| ການເຊື່ອມຕໍ່. | |||
| ບໍ່ມີ 12V | ປ່ຽນວົງຈອນ | ||
| ກະດານ. | |||
| ປະກົດການຜິດ | ການຕັດສິນຄວາມຜິດ | ມາດຕະການການປິ່ນປົວ | |
| ບໍ່ເຮັດວຽກ, ແລະຕົວຊີ້ວັດພະລັງງານ 3.3v ແລະທໍ່ດິຈິຕອນບໍ່ສະຫວ່າງ. | ສະວິດເປີດ, 220 ສະຖານະຕົວຊີ້ບອກພະລັງງານ | ບໍ່ສົດໃສ | ກວດສອບ & ທົດແທນປະກັນໄພ .ກວດເບິ່ງ & ປ່ຽນສາຍໄຟ. ກວດສອບ & ປ່ຽນສະວິດ. |
| ສົດໃສ | ປ່ຽນກະດານວົງຈອນ. | ||
| ມໍເຕີບໍ່ເຮັດວຽກ | ກໍານົດພາລາມິເຕີ P6 ໂດຍອ້າງອີງໃສ່ 3.1.3, ເພີ່ມຄວາມໄວຂອງກະແສໄຟຟ້າ (ແຮງບິດຄວາມໄວສູງ), ແລະເລີ່ມຕົ້ນການເຮັດວຽກໃຫມ່. | ແກ້ໄຂບັນຫາ | ຈົບ |
| ຄວາມຜິດຍັງຄົງຢູ່ | 1.ປ່ຽນແຜງວົງຈອນ.2.ຕັດການເຊື່ອມຕໍ່ຈາກປະຕູໄປຫາແຂນ rocker ແລະກວດເບິ່ງວ່າ dooris blocked.3.ປ່ຽນ motor ຫຼື gearbox. | ||
| ເປີດບໍ່ຢູ່ໃນສະຖານທີ່ | ເພີ່ມມູນຄ່າ P13, ເພີ່ມມຸມເປີດປະຕູ. | ||



